







Заказ OnLine : Ваша корзина


По жидкости начнут плавать рукотворные биороботы
И без того многообразный мир микроскопических обитателей воды пополнился новыми членами – синтетическими самодвижущимися плавающими биороботами.
Группа исследователей под руководством Тахера Саифа из Университета Иллинойса разработала новый тип крошеных биогибридных машин, способных передвигаться подобно сперматозоидам. Результаты работы инженеров из Иллинойса представляют собой первые синтетические структуры, которые самостоятельно могут проходить сквозь обладающие достаточной вязкостью биологические жидкости.
Как отмечает Саиф, микроорганизмы представляют собой целый мир, который до определенного момента мы могли изучать только с помощью микроскопа, и вот впервые рукотворная система смогла достигнуть этого «нижнего мира».
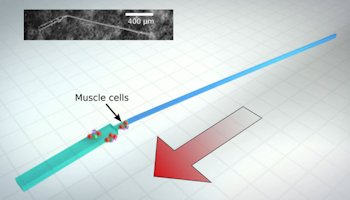
Инженеры разработали первые синтетические микромашины, которым могут плавать сами по себе, а точнее – за счет сокращения внедренных в их структуру клеток сердечной мышцы.
Биороботы были созданы по образу и подобию одноклеточных созданий, обладающих длинными хвостами – жгутиками. Примером такого представителя микромира может быть, например, клетка-сперматозоид. Исследователи начали свою работу с изготовления тела микроробота из гибкого полимерного материала, после чего в области соединения головки и хвоста этого полимерного каркаса культивировались клетки сердечной мышцы. Эти клетки самоорганизовывались таким образом, что их взаимное расположение и совместное сокращение способствовало волнообразным движениям хвоста, приводящим биоробота в движение.
Как отмечает Саиф, самоорганизация клеток представляет собой уникальное и протекающее самопроизвольное явление, причем то, как происходит взаимодействие клеток, находящихся на гибком хвосте полимера, пока еще до конца неясно и требует дальнейшего исследования, тем не менее для того, чтобы биоробот мог двигаться в нужном направлении, необходимо синхронное сокращение всех клеток. Как отмечает Саиф, система требует лишь минимального вмешательства инженеров – они изготавливают только полимерные головку и хвост, а функциональность биороботам придают уж клетки.
Исследователям также удалось также разработать и биороботы с двумя хвостами, скорость перемещения таких систем была еще больше, а наличие нескольких хвостов упрощает контроль перемещения биоробота в нужном направлении. Исследователи предполагают, что в будущем удастся сконструировать биороботы, которые смогут перемещаться под влиянием химического воздействия или света, что позволит управлять движением таких систем в ходе медицинских исследований или при изучении объектов окружающей среды.
В более отдаленных перспективах использования гибридных биороботов типа пластик-живые клетки для доставки дифференцирующихся стволовых клеток или противоопухолевых препаратов.
